 Simulated skin-opening surgery using Staubli TX-60 Robot
Simulated skin-opening surgery using Staubli TX-60 RobotAbstract
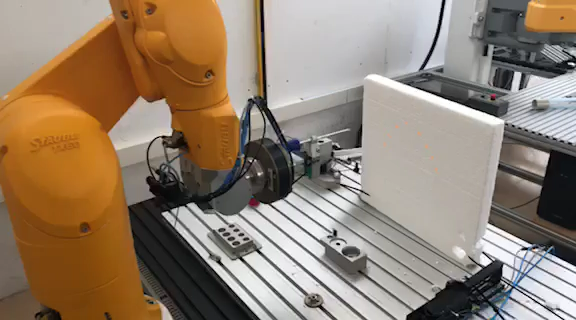
For this project, we chose Staubli TX-60 robot. This is a 6 Degrees of Freedom industrial robot which is mounted on horizontal base on the floor. Before starting the project, some installations were performed on the end-effector and the work- table. The project was divided into two main stages. First, we mounted the scalpel on the end-effector using scotch and strips. Second, a board of Styrofoam was fixed vertically to apply the operation on. Steps:
- Read the coordinates of the nine points using the Manual Control Pendant (MCP).

- Send the points coordinates to Staubli Robotics Suite for simulation.

Write the needed instructions.
Upload the program and run.

Check this video please https://user-images.githubusercontent.com/23275312/116787051-3c6afb00-aaa2-11eb-99e4-e9191fdf2c74.mp4
Many thanks to Prof. Xavi Cufi, the University of Girona, for his support (2018-2019) and providing the needed tools.